
TECHNOLOGY INTROCUCTION
TECHNOLOGY
INTROCUCTION
Integrated Drive GXM Shifting Technology #1
F·Link Shifting
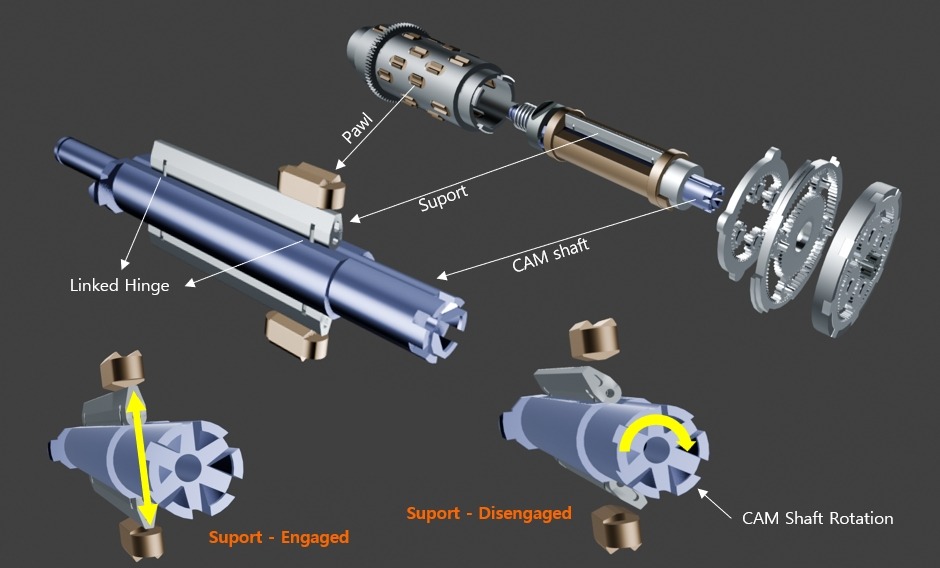
Within the main shaft, the CAM Module selectively protrudes the pawl according to its rotational position, locking the desired gear ratio.
The key characteristic of this architecture is its ability to engage and disengage the pawl and gear freely, enabling smooth shifting without mechanical constraints.
In conventional drivetrain systems, engagement and disengagement between gears and shafts are typically constrained.
Power must be interrupted or a clutch mechanism must be used, as forced engagement of a pawl or dog clutch under load can damage meshing surfaces.
Allto refers to this constraint-free shifting technology as F·Link (Free + Link).
It enables smooth, unrestricted shifting through the linked interaction of three core components: the CAM shaft, Alignment Rotor, and Support.
Integrated Drive GXM Shifting Technology #1
F·Link Shifting
Within the main shaft, the CAM Module selectively protrudes the pawl according to its rotational position, locking the desired gear ratio.
The key characteristic of this architecture is its ability to engage and disengage the pawl and gear freely, enabling smooth shifting without mechanical constraints.
In conventional drivetrain systems, engagement and disengagement between gears and shafts are typically constrained.
Power must be interrupted or a clutch mechanism must be used, as forced engagement of a pawl or dog clutch under load can damage meshing surfaces.
Allto refers to this constraint-free shifting technology as F·Link (Free + Link).
It enables smooth, unrestricted shifting through the linked interaction of three core components: the CAM shaft, Alignment Rotor, and Support.
Integrated Drive GXM Shifting Technology #1
F·Link Shifting
Within the main shaft, the CAM Module selectively protrudes the pawl according to its rotational position, locking the desired gear ratio.
The key characteristic of this architecture is its ability to engage and disengage the pawl and gear freely, enabling smooth shifting without mechanical constraints.
In conventional drivetrain systems, engagement and disengagement between gears and shafts are typically constrained.
Power must be interrupted or a clutch mechanism must be used, as forced engagement of a pawl or dog clutch under load can damage meshing surfaces.
Allto refers to this constraint-free shifting technology as F·Link (Free + Link).
It enables smooth, unrestricted shifting through the linked interaction of three core components: the CAM shaft, Alignment Rotor, and Support.
* Support Engagement:
When the CAM shaft and Support are aligned in a straight line, the pawl is fully supported and protrudes from the main shaft.
In this state, the pawl and gear are fully meshed, allowing torque transmission.
* Support Disengagement:
When the CAM shaft rotates, the Linked Hinge alters the alignment of the Support, which had been resisting the load applied by the pawl.
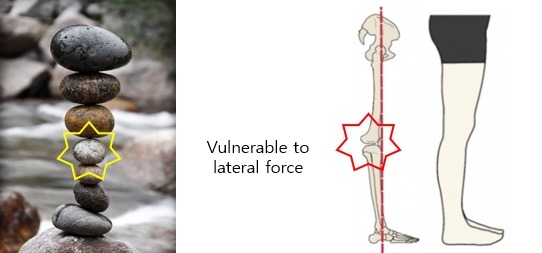
When both sides of the Support remain perfectly straight, they can withstand high loads. However, even a small force applied through the linked hinge causes the alignment to collapse, allowing disengagement.
This operates on the same principle as a stacked structure: stable under vertical load, but easily displaced when lateral force is applied at the pivot.
* Support Engagement:
When the CAM shaft and Support are aligned in a straight line, the pawl is fully supported and protrudes from the main shaft.
In this state, the pawl and gear are fully meshed, allowing torque transmission.
* Support Disengagement:
When the CAM shaft rotates, the Linked Hinge alters the alignment of the Support, which had been resisting the load applied by the pawl.
When both sides of the Support remain perfectly straight, they can withstand high loads. However, even a small force applied through the linked hinge causes the alignment to collapse, allowing disengagement.
This operates on the same principle as a stacked structure: stable under vertical load, but easily displaced when lateral force is applied at the pivot.
* Support Engagement:
When the CAM shaft and Support are aligned in a straight line, the pawl is fully supported and protrudes from the main shaft.
In this state, the pawl and gear are fully meshed, allowing torque transmission.
* Support Disengagement:
When the CAM shaft rotates, the Linked Hinge alters the alignment of the Support, which had been resisting the load applied by the pawl.
When both sides of the Support remain perfectly straight, they can withstand high loads. However, even a small force applied through the linked hinge causes the alignment to collapse, allowing disengagement.
This operates on the same principle as a stacked structure: stable under vertical load, but easily displaced when lateral force is applied at the pivot.
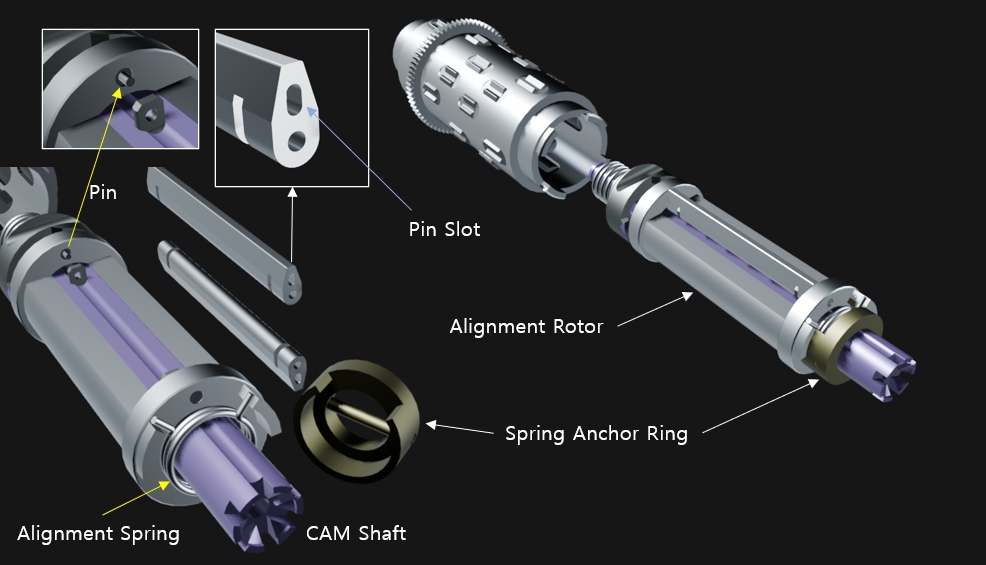
* Mechanical Coordination Process:
The Spring Anchor Ring fixed to the CAM shaft rotates first.
The Alignment Spring rotates simultaneously, driven by the Spring Anchor Ring.
This motion rotates the Alignment Rotor.
As a result, the Alignment Rotor and CAM shaft can shift relative angles through the spring and return to their original reference position.
Similarly, the Support is connected to the CAM shaft via a Linked Hinge, allowing angular deviation.
However, it is continuously realigned to a reference angle by a positioning pin on the Alignment Rotor.
The pin slot on the Support is designed as an elongated groove, enabling free movement when the Support shifts angle.
This architecture allows the Support to disengage even when high loads are applied to the pawl.
Because components are connected through a link-based structure, rotational motion is induced smoothly without mechanical shock.
As a result, the system enables smooth, automotive-grade shifting performance within a compact gearbox.
Moreover, this architecture achieves such performance without relying on complex components such as clutches or hydraulic systems, making it both mechanically efficient and structurally innovative.
* Mechanical Coordination Process:
The Spring Anchor Ring fixed to the CAM shaft rotates first.
The Alignment Spring rotates simultaneously, driven by the Spring Anchor Ring.
This motion rotates the Alignment Rotor.
As a result, the Alignment Rotor and CAM shaft can shift relative angles through the spring and return to their original reference position.
Similarly, the Support is connected to the CAM shaft via a Linked Hinge, allowing angular deviation.
However, it is continuously realigned to a reference angle by a positioning pin on the Alignment Rotor.
The pin slot on the Support is designed as an elongated groove, enabling free movement when the Support shifts angle.
This architecture allows the Support to disengage even when high loads are applied to the pawl.
Because components are connected through a link-based structure, rotational motion is induced smoothly without mechanical shock.
As a result, the system enables smooth, automotive-grade shifting performance within a compact gearbox.
Moreover, this architecture achieves such performance without relying on complex components such as clutches or hydraulic systems, making it both mechanically efficient and structurally innovative.
* Mechanical Coordination Process:
The Spring Anchor Ring fixed to the CAM shaft rotates first.
The Alignment Spring rotates simultaneously, driven by the Spring Anchor Ring.
This motion rotates the Alignment Rotor.
As a result, the Alignment Rotor and CAM shaft can shift relative angles through the spring and return to their original reference position.
Similarly, the Support is connected to the CAM shaft via a Linked Hinge, allowing angular deviation.
However, it is continuously realigned to a reference angle by a positioning pin on the Alignment Rotor.
The pin slot on the Support is designed as an elongated groove, enabling free movement when the Support shifts angle.
This architecture allows the Support to disengage even when high loads are applied to the pawl.
Because components are connected through a link-based structure, rotational motion is induced smoothly without mechanical shock.
As a result, the system enables smooth, automotive-grade shifting performance within a compact gearbox.
Moreover, this architecture achieves such performance without relying on complex components such as clutches or hydraulic systems, making it both mechanically efficient and structurally innovative.