
Development Story
First Prototype (Chain-Based Gearbox)
First Prototype (Chain-Based Gearbox)
First Prototype
(Chain-Based Gearbox)
I had always been good with my hands, but this was my first experience with true product development.
I had no clear plan and no idea where to begin.
I started with ideas alone, then searched endlessly for someone who could manufacture the parts.
Although South Korea has a highly developed mass-production ecosystem, it is extremely difficult to find manufacturers willing to
produce small quantities of custom parts.
After two years of trial and error, I finally managed to fabricate the components.
Most of the parts did not assemble as intended.
With only a few basic tools, I forced the gearbox to operate in some form.
I doubt I could ever recreate that period again.
However, the chain-based gearbox was ultimately nothing more than a large and heavy structure that merely functioned.
While it operated smoothly, it felt as if much of the pedaling force was being lost somewhere inside—
like stepping on a sponge rather than a solid mechanical connection.
I had invested an enormous amount of effort, yet I immediately realized that it had no commercial viability.
The disappointment was profound, and this prototype nearly made me give up development altogether.
{kind=link}
{kind=link}
Second Prototype (Gearbox)
Second Prototype (Gearbox)
Second Prototype
(Gearbox)
My decision to use a chain in the first gearbox was based on a misconception that it would significantly reduce cost.
Through this process, I learned that gears—when produced at scale—are far more affordable than I had assumed.
The gear prices I had in mind were greatly exaggerated, a mistake born from my lack of understanding of the gear manufacturing
industry.
For the second prototype, I switched to a gear-based design, and the results were better than expected.
After the disappointment of the first failure, the progress achieved in this second attempt gave me a renewed sense of hope.
Due to my limited knowledge, I sought help from professionals in the component manufacturing industry.
Even so, precision mechanical parts involve countless considerations, and this version remained no more than an early prototype.
At the time, I had little understanding of gear modules and applied them without proper calculation.
I was unaware of the critical importance of tolerances and focused solely on making the system function.
I also did not yet fully recognize the significance of durability and long-term reliability issues.
In an effort to reduce costs, the frame from the first prototype was reused.
{kind=link}
{kind=link}
Third Prototype
Third Prototype
Third Prototype
By this time, I began to develop an intuitive sense for what it meant to build a prototype.
Through deeper consideration and study, I started to understand what should be applied—and what required caution.
I began applying proper gear modules, studying tolerances, and developing more detailed drawings.
Compared to the second prototype, this version was clearly improved and started to feel more complete.
However, fundamental issues still remained.
This was ultimately no more than an incremental improvement on the second prototype, rather than a true breakthrough.
It was around this time that I began to recognize the importance of a truly complete product.
A mechanism that merely functions—and allows a bicycle to move forward—is not something that can be sold.
{kind=link}
{kind=link}
Fourth Prototype
During the development of this prototype, I fully recognized a critical issue that I had overlooked for years—
a fundamental durability problem occurring during the shifting process itself.
At the time, the bicycle could still move forward, and I found myself wanting to ignore the fact that the structure could not guarantee
durability.
The mechanism forcibly disengaged the pawls from the gears, a design that inevitably led to wear or failure.
My pride in having come this far without a formal engineering background had clouded my judgment.
I was spending excessive time, energy, and resources on secondary details, while overlooking what truly mattered.
Fortunately, I sensed clearly that without solving this problem, there would be no future.
There were only two choices left:
to solve it—or to stop here.
{kind=link}
{kind=link}
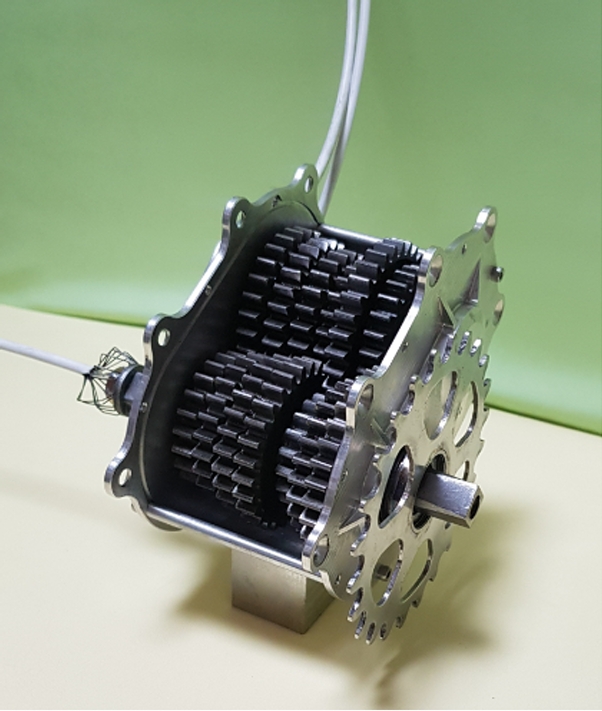
Fifth Prototype
This prototype marks the origin of what would become the current ATB gearbox.
While its external appearance was not significantly different from earlier versions, the pawl structure that caused critical durability issues
was fundamentally resolved.
Previous designs had experimented with forcibly disengaging the pawls from the gears, as this allowed freer shifting.
However, such structures inevitably lead to component wear and eventual failure.
In this revised design, the pawls disengage from the gears only when pedaling force is released.
This approach is common to all reliable gearbox designs today.
Although this method introduces a slight inconvenience, it eliminates the constant concern of gearbox failure.
Through developing this prototype, I made a clear commitment to the democratization of gearboxes.
Many of its components were designed for mass production using molds, and unlike conventional gearboxes, its assembly structure was
intentionally simplified.
This makes assembly and disassembly significantly easier, offering strong advantages in production cost control and long-term
serviceability.
However, this prototype was still produced in small quantities.
As a result, I could not yet be fully confident in its scalability for mass production.
{kind=link}
{kind=link}
First Pre-Production Samples (15-Speed) - Belt drive
First Pre-Production Samples (15-Speed)
- Belt drive
First
Pre-Production Samples
(15-Speed) - Belt drive
In 2023, I began to seriously envision mass production.
However, due to limited funding, I had no choice but to start with small-batch manufacturing.
To make gearbox democratization possible, low-cost components were essential. This led me to reach out to manufacturers in China.
It was, honestly, an anxious step. I did not speak the language, and I had no way of predicting how this attempt would turn out.
Through Chinese component sourcing platforms, I placed orders with several suppliers. The results were better than expected.
Many of these manufacturers already had extensive experience supplying OEM customers worldwide and responded to my requirements with
sincerity and professionalism. When the parts arrived, most met my expectations.
Some components had issues—caused partly by my own mistakes and partly by supplier errors.
After many difficulties, I managed to assemble all of the prototypes into fully functioning gearboxes.
The process was exhausting, but it became a critical turning point for my growth.
Through these transactions with Chinese suppliers, I learned many essential lessons—
lessons that are indispensable for continuing and sustaining this gearbox business.
{kind=link}
{kind=link}
Second Pre-Production Samples (10-Speed & 12-Speed)
- Magnesium Housing
Second Pre-Production Samples
(10-Speed & 12-Speed)
- Magnesium Housing
Second
Pre-Production Samples
(10-Speed & 12-Speed)
- Magnesium Housing
I approached the second round of pre-production samples with a clear and specific goal.
The primary issue was a fundamental limitation of the gearbox design:
because the pawl must disengage, pedaling must momentarily stop during shifting.
In the 15-speed configuration, the gearbox used a 5 × 3 structure—
five input gears combined with three output ranges corresponding to low, mid, and high speed.
However, it became clear that this 15-speed configuration was unnecessary for real-world riding.
The most critical problems occurred during range transitions— specifically at the 5 → 6and 10 → 11shifts.
At these points, the 12th gear becomes engaged, and a noticeable overload sensation is transmitted to the pedals.
These transitions occur during hill climbing or high-speed riding, precisely where stability and smooth power delivery are essential.
For a gearbox intended for MTB and touring use, 15 speeds provided no practical benefit while introducing additional complexity and
discomfort.
As a result, I redesigned the system into a 6 × 2 = 12-speed structure. Although a slight overload sensation still remains at the 6 → 7
transition,
this shift does not occur under high load or steep climbing conditions.
With a 573% gear range, the 12-speed configuration proved to be more than sufficient for real-world riding.
This confirmed that 15 speeds were not only unnecessary, but counterproductivefor this application.
However, eliminating the remaining overload sensation at the transition point remained an important challenge.
{kind=link}
{kind=link}
{kind=link}
Third Pre-Production Sample (7Speed)
Third Pre-Production Sample (7Speed)
Third
Pre-Production Sample
(7Speed)
I have a clear and unwavering goal: the true democratization of gearboxes. And I am confident that ATB7is the solution.
ATB7 uses a different power transmission architecture from ATB12.
At the pedal shaft, there is only a single input gear, which meshes with a smaller gear on the main shaft.
This configuration increases the rotational speed of the main shaft by 1.8 times, while reducing torque by the same factor.
As a result, the gears on the main shaft and output shaft operate under significantly lower stress,
making them inherently safer in terms of durability. This principle allows the use of powder-metal gears.
Powder-metal gears are approximately 30% weaker than heat-treated alloy gears,
but in this architecture, they can be used without any durability issues.
More importantly, the production cost of powder-metal gears is less than 30% of alloy gears.
For urban commuting or school transportation, this gearbox is more than sufficient.
With a 360% gear range, it covers all real-world riding conditions. Another major advantage of ATB7 is that, unlike ATB12,
there are no overload-prone shifting zones. When applied to hub-motor e-bikes, ATB7 is fully adequate in every respect.
When combined with a belt drive, it enables the creation of a truly premium urban e-bike.
Through this gearbox, I am confident that true gearbox democratization can finally be achieved.
{kind=link}
{kind=link}
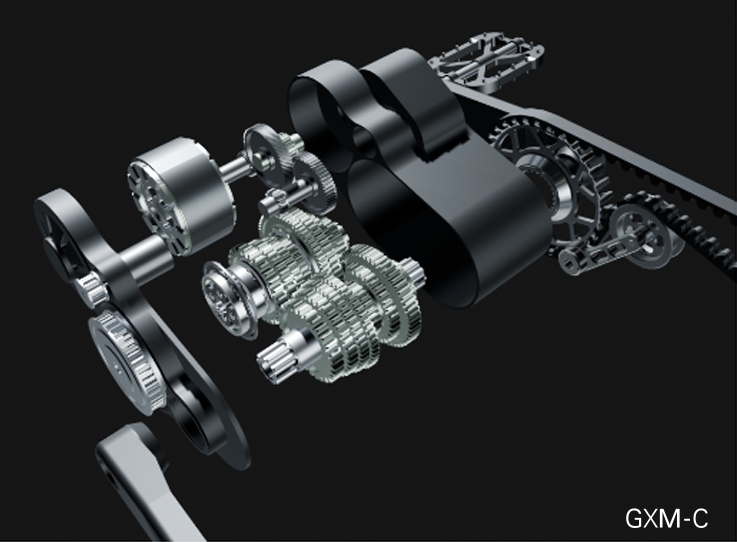
GXM Concept Development & Patent Filing
Although the journey was slow, I continued to move forward.
Through many years of trial and experience, I began to gain deeper knowledge and clearer insight.
During this time, I came to understand that there is a technology the global E-mobility market is truly waiting for.
What the market desires most is a new kind of powertrain—one that goes beyond the limitations of electric motors alone,
and beyond the inherent weaknesses of derailleur-based systems. Few would disagree that the answer lies in an integrated drive system.
A fully sealed powertrain—combining the motor, control electronics, and transmission inside a single enclosed housing—
represents the most complete and logical solution.
Fortunately, I had already accumulated extensive experience and proprietary know-how through years of gearbox development.
With that foundation, I believe I have found the answer. I developed a concept for an electronically actuated shifting system,
capable of delivering smooth, automatic shifting similar to automotive transmissions.
At the core of this concept is a technology called the Reduction Channel—
a small motor that interprets digital signals and executes gear shifts with precision.
To perfectly carry out the commands of this channel and enable shock-free shifting,
two distinct shifting architectures were developed:
•F·Link Shifting: Uses pawls, while allowing free disengagement and engagement from the gears. This structure is optimized for electric bicycles.
•S·R Shifting: Uses a star-ratchet mechanism, ensuring extremely high durability.
This structure is designed for electric motorcycles, microcars, and cargo bikes.
These technologies are currently in the design and development phase. The goal for 2026 is to complete fully functional prototypes based on this system.
{kind=link}
{kind=link}